

Description
The V5+ AutoPilot is an advanced autopilot for academic and commercial integrators. Designed by CUAV in collaboration with the PX4 team. Based on the Pixhawk FMUv5 open hardware design, a highly modular board using Pixhawk standard pinouts for its external interface, allowing for carrier board integration. Out of the box pre-installed with PX4 Open Source Autopilot, and fully supported by ArduPilot.
New Hardware Design based on FMUv5 V5+ is a high-performance flight controller based on the FMCJv5 open hardware design. With a more advanced processor, larger FLASH and RAM, and more reliable sensors, the autopilot is suitable for commercial systems integration and academic research uses.
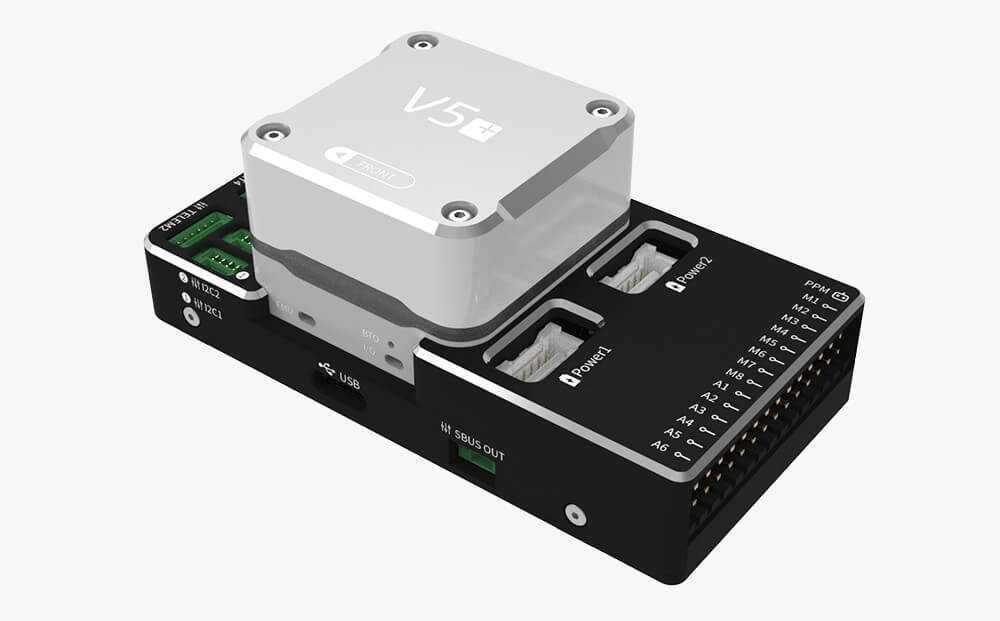
Detachable CORE Design V5+ adopts a modular form factor in its design. Ships with the “core” module and baseboard, it can be installed directly into your projects with the option to use deeply integrate into your setup via customized carrier board. Note: CUAV provides an open carrier board reference design that allows the user to design the carrier board or contact the sales consultation to customize the details.
Built-in Patented Damping System, The sensors and the mainboard are separated and designed with a built-in high-performance shock absorption system to adapt to various severe environments. The applicability is stronger.
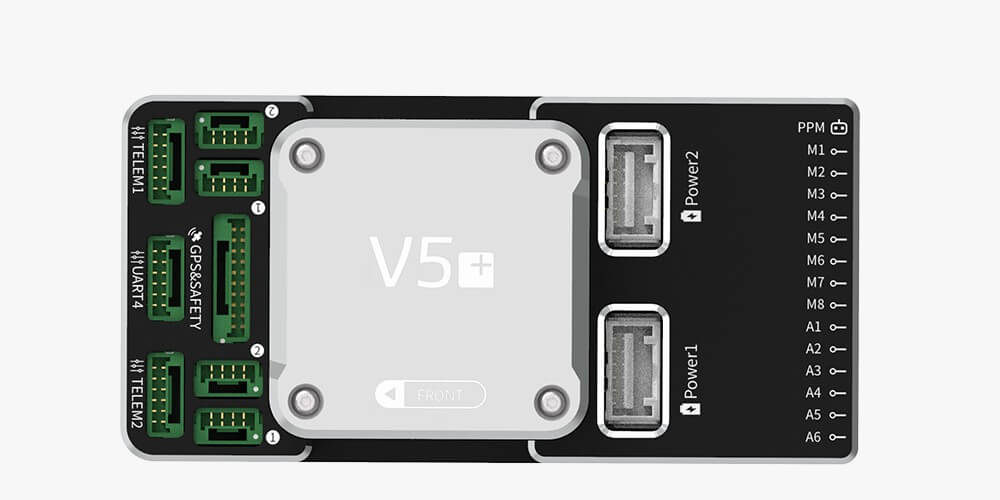
Full adherence to PX4 official standards CUAV is a silver member of Dronecode and committed to promoting the PX4 open-source project. The V5+ interfaces are designed according to official PX4 standards to ensure compatibility and interoperability with hardware and software products in the Pixhawk 4 ecosystem.
Multi-sensor redundancy combination Built-in five sets of sensors, the flight controller monitors the multi-channel sensor data in real-time, and performs redundant switching immediately in the event of a fault, improving flight safety and stability.
Faster F 765 processor V5+ selects the STM32F 765 processor with better performance. Its frequency is up to 216MHZ and it contains 2MB FLASH/512K RAM. The clock speed is higher, the RAM is larger, and the speed will be greatly improved.
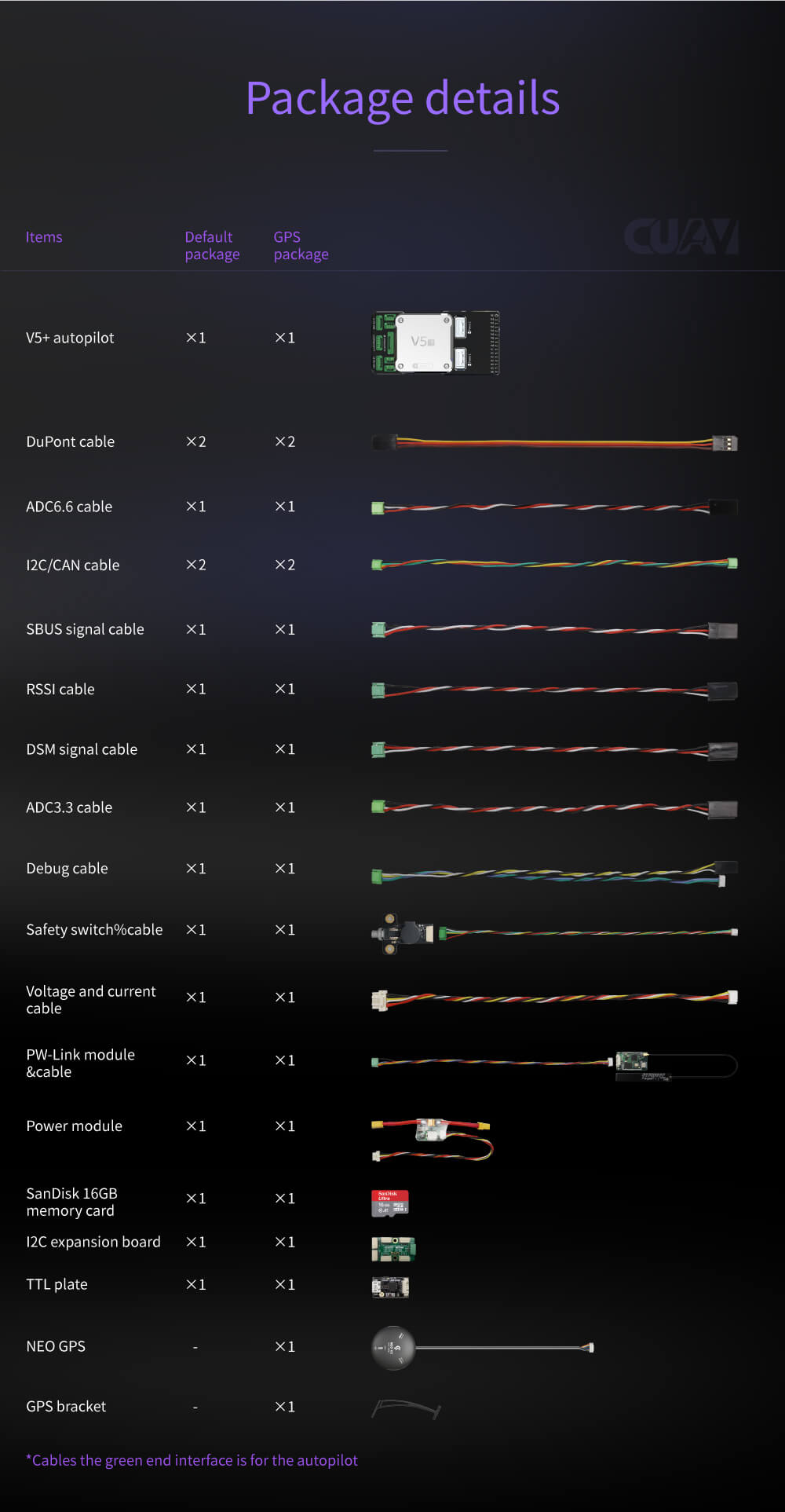
Support RT K centimeter positioning, the CUAV V5+ flight Controller supports the RTK positioning module for precise centimeter positioning to meet your higher positioning requirements.(RTK positioning module needs to be purchased separately)
Specification of CUAV V5+ Autopilot Pixhack 4 PX4 APM Flight Controller
- Main FMU Processor: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
- IO Processor: STM32F100
- 32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM
- On-board sensors:
- Accelerometer/Gyroscope: ICM-20689
- Accelerometer/Gyroscope: BMI055
- Magnetometer: IST8310
- Barometer: MS5611
- Interfaces:
- 8-14 PWM outputs (6 from IO, 8 from FMU)
- 3 dedicated PWM/Capture inputs on FMU
- Dedicated R/C input for CPPM
- Dedicated R/C input for PPM and S.Bus
- analog / PWM RSSI input
- S.Bus servo output
- 5 general-purpose serial ports
- 4 I2C ports
- 4 SPI buses
- 2 CANBuses with serial ESC
- Analog inputs for voltage/current of 2 batteries
- Power System:
- Power: 4.3~5.4V
- USB Input: 4.75~5.25V
- Servo Rail Input: 0~36V
- Weight and Dimensions:
- Weight: 90g
- Dimensions: 85.5*42*33mm
- Other Characteristics:
- Operating temperature: -20 ~ 80°c (Measured value


")