
1 Overview
With the popularity of lidar technology, thanks to its precise range resolution and high angular resolution, it can obtain richer contour information, in surveying and mapping, automated docks, mines, engineering vehicles and robotic automatic driving, traffic monitoring, Security and other fields have become an indispensable technical means of environmental awareness and security protection. In the actual application scenario, we need products that can work reliably all day long, and most LiDAR devices can work in harsh environments such as rain, fog, snow, dust, high and low temperature, and strong light. Visible light data acquisition defects, and it has a certain filtering optimization function, which can effectively filter noise and ensure data accuracy and data effects.
Our D-LiDAR200 airborne laser radar system uses a cost-effective mapping laser scanning product RIEGL mini VUX-1UAV. The main features are as follows:
(1) This product is based on RIEGL advanced waveform processing technology, through high-speed laser ranging data acquisition through waveform digitization and real-time waveform processing technology;
(2) Excellent multi-target detection capability enables high-precision measurement results even under adverse atmospheric conditions;
(3) The angle of view is 360°, which can collect panoramic scan data;
(4) A narrow measurement beam with low divergence achieves high spatial resolution;
(5) Multi-target detection function – up to 5 target echoes per laser.
This article focuses on the test results, experience and lessons of our company’s D-LiDAR200 airborne laser radar system in terms of tree penetration capability, so that everyone can learn from and predict in engineering applications and assist decision-making. First, I will briefly introduce the knowledge of multiple echoes (Multi-Echo) involved in tree penetration:
Typical pulsed TOF (Time of Flight Ranging) works: The laser radar emits a laser pulse. When the emitted laser is reflected back to the receiver by the object, the distance of the object can be calculated by the time difference between transmission and reception.
● Single echo: As long as the receiver receives the echo signal whose intensity reaches the trigger threshold, it is considered that the object is detected and the output distance value is calculated. The disadvantage of this method is that if there is other partially transparent material between the scanner and the measured object, such as rain and snow dust commonly found in outdoor environments, part of the laser energy will be reflected back in advance, as long as the trigger threshold is reached. It is considered to be the measured object and causes measurement errors.
●Multiple echoes: On the basis of single echo, the laser receiving unit uses the built-in high-speed circuit for sampling and analysis of the returned laser waveform. The external interference echo and the effective object echo will have waveform and time distribution. Different characteristics, so that the signal of the real test object can be accurately identified.
The application of multiple echo technology makes it possible for laser measurement to penetrate glass, rain mist, dust, etc., thus ensuring reliability in harsh outdoor environments. The echo information of LiDAR includes two aspects: the number of echoes and the number of echoes. The echo number features a single echo and multiple echoes; the first echo features include first echo, intermediate echo and last echo. The ground usually has only one reflection echo in the unobstructed condition. If it is blocked by the tree, the last echo of some laser points is reflected back from the ground due to the existence of the tree gap, so the last echo point of multiple echoes is exhibited. Generally, it corresponds to the characteristics of the ground point; the building is generally composed of solid materials such as reinforced concrete, and the laser point is not easy to penetrate on it, so usually only has a single echo, but multiple reflections occur at the edge of the building; vegetation points Due to the existence of the gap, the laser spot will be reflected multiple times. The first echo appears on the surface of the canopy, the middle echo appears on the branches and leaves, and the last echo generally hits the ground through the gap.
- Typical case sharing
The D-LiDAR200 airborne lidar system has a clear advantage in tree penetration with multi-target detection (up to 5 target echoes per laser), providing technical support for accurate access to terrain under vegetation cover. Here, several typical practical engineering cases are used to introduce the operation of LiDAR under different vegetation cover types and the penetration of point clouds for reference.
2.1 Qingdao ( Reed marsh): Unaffected and penetrated.



2.2 Jilin (coniferous forest): unaffected and penetrable.


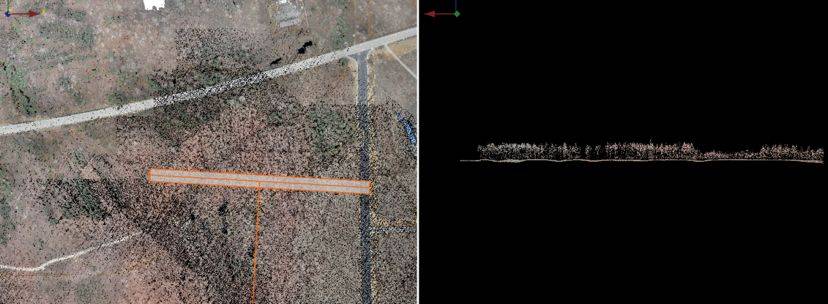
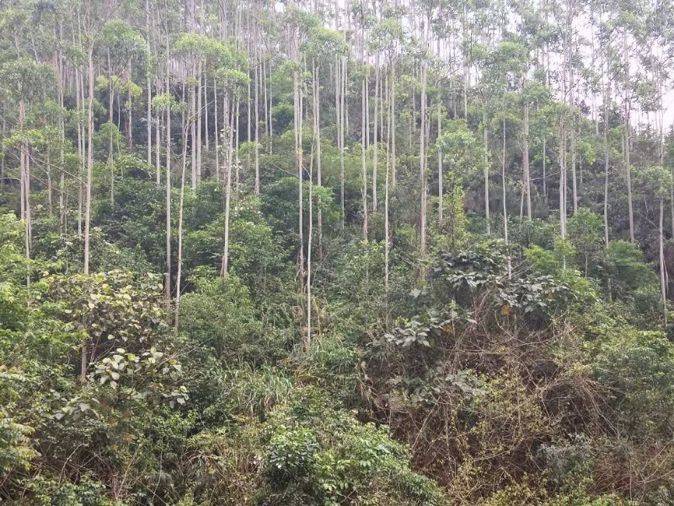
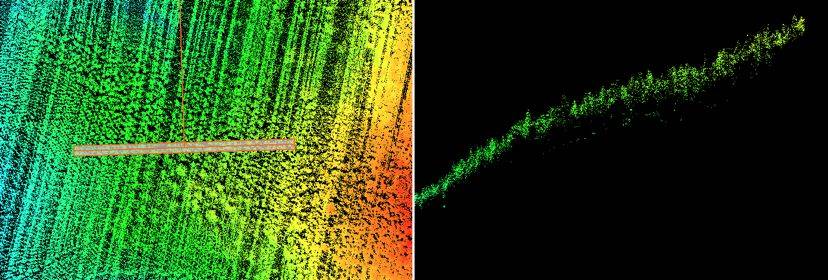
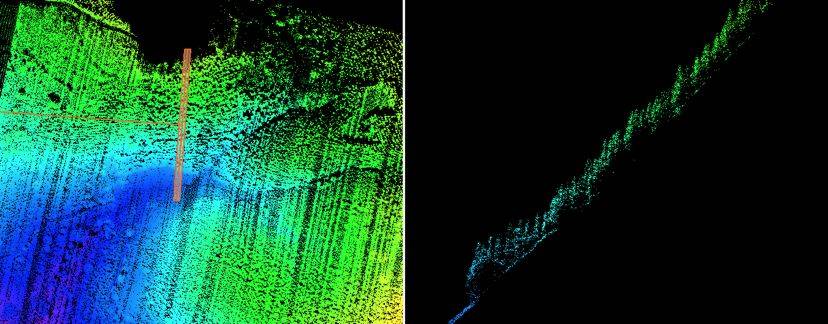
2.3 Nandan (eucalyptus): unaffected, (dense bushes): greater impact, still partially penetrated.
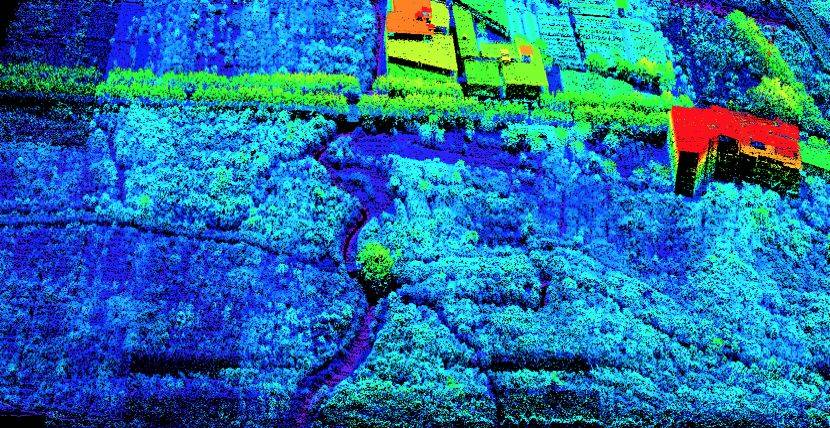
2.4 Guangzhou (a densely populated area): It can penetrate and meet the terrain acquisition requirements.

2.5. Harbin – dense coniferous forest (pine cypress) can penetrate, almost unaffected.




You must be logged in to post a comment.